ADMM for Computing Subspace Preserving Representations
We solve the program
\[\min \| C \|_{1,1} \quad \text{ s.t. } Y = Y C, \; \Diag(C) = 0.\]
We solve the program
\[\min \| C \|_{1,1} \quad \text{ s.t. } Y = Y C, \;
C^T \OneVec = \OneVec, \; \Diag(C) = 0.\]
We solve the program
\[\min \| C \|_{1,1} + \frac{\lambda}{2} \| Z \|_F^2
\quad \text{ s.t. } Y = Y C + Z, \;
\Diag(C) = 0.\]
Eliminate Z from the program
\[\min \| C \|_{1,1} + \frac{\lambda}{2} \| Y - YC \|_F^2
\quad \text{ s.t. } \Diag(C) = 0.\]
Introduce an auxiliary matrix \(A\) and consider the program
\[\min \| C \|_{1,1} + \frac{\lambda}{2} \| Y - YA \|_F^2
\quad \text{ s.t. } A = C - \Diag(C).\]
The two programs have same solution.
Adding the penalty terms for equality constraints
\[\min \| C \|_{1,1} + \frac{\lambda}{2} \| Y - YA \|_F^2
+ \frac{\rho}{2} \| A - (C - \Diag(C)) \|_F^2
\quad \text{ s.t. } A = C - \Diag(C).\]
Adding the penalty term doesn’t change the solution. The
penalty term vanishes for any feasible solution. The
objective function is now strictly convex.
Constructing the augmented Lagrangian
\[\LLL(C, A, \Delta) =\| C \|_{1,1} + \frac{\lambda}{2} \| Y - YA \|_F^2
+ \frac{\rho}{2} \| A - (C - \Diag(C)) \|_F^2
+ \Trace(\Delta^T (A - (C - \Diag(C)))).\]
The ADMM algorithm would consist of
- Update \(A^{k+1}\) based on \((C^k, \Delta^k)\)
- Update \(C^{k+1}\) based on \((A^{k+1}, \Delta^k)\)
- Update \(\Delta^{k+1}\) based on \((A^{k+1}, C^{k+1})\)
\(A\)-update
\(\LLL(C, A, \Delta)\) is a quadratic in \(A\).
Differentiating w.r.t. \(A\) gives us:
\[\lambda Y^T (YA - Y) + \rho (A - (C - \Diag(C))) + \Delta = 0.\]
Rearranging the terms we get:
\[(\lambda Y^T Y + \rho I )A =
\lambda Y^T Y + \rho (C - \Diag(C)) - \Delta.\]
Note that, by construction, we will ensure that \(\Diag(C) = 0\)
for each iteration. Thus, \(A\) is updated by
solving the equation:
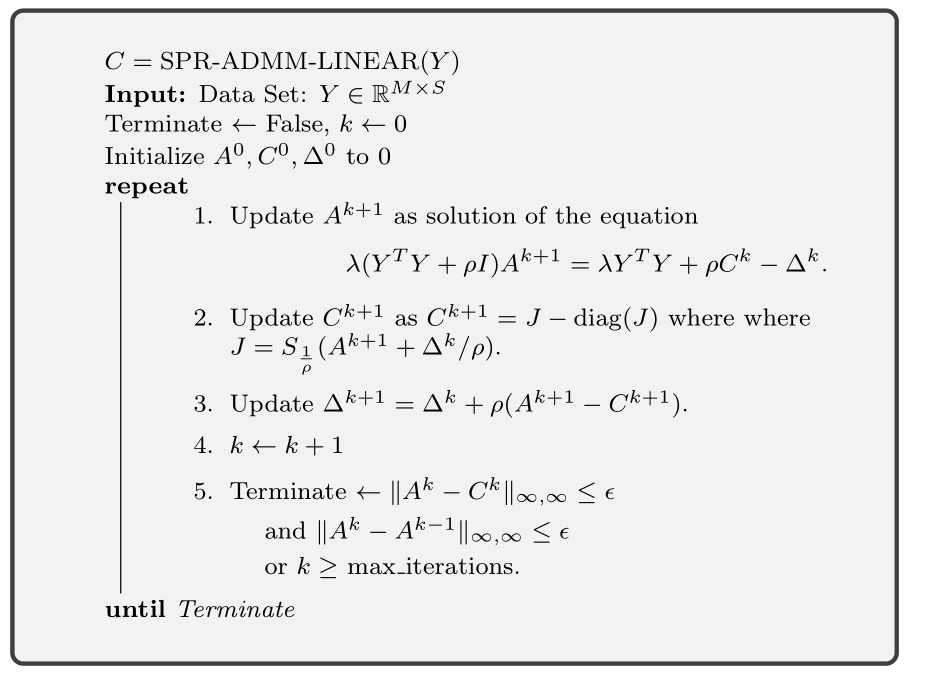
\[(\lambda Y^T Y + \rho I )A^{k+1} =
\lambda Y^T Y + \rho C^k - \Delta^k.\]
\(C\) update
Let’s rewrite the augmented Lagrangian by removing the \(\Diag(C)\)
terms as:
\[\LLL(C, A, \Delta) = \min \| C \|_{1,1} + \frac{\lambda}{2} \| Y - YA \|_F^2
+ \frac{\rho}{2} \| A - C \|_F^2
+ \Trace(\Delta^T (A - C )).\]
Remove the terms which don’t depend on \(C\)
\[\min \| C \|_{1,1} + \frac{\rho}{2} \| C - A\|_F^2 - \Trace(\Delta^T C ).\]
A closed-form solution for the minimizer of this expression is
\[J = S_{\frac{1}{\rho}} (A^{k+1} + \Delta^k / \rho)\]
where \(S\) is the element wise soft thresholding or shrinkage
operator.
We obtain \(C\) from \(J\) by:
\[C^{k+1} = J - \Diag(J).\]
Note that this construction ensures that \(\Diag(C)\) is always 0.
\(\Delta\) update
We perform the gradient ascent update of \(\Delta\) as
\[\Delta^{k+1} = \Delta^k + \rho (A^{k+1} - C^{k+1}).\]
We solve the program
\[\min \| C \|_{1,1} + \lambda_e \| E \|_{1,1} + \frac{\lambda_z}{2} \| Z \|_F^2
\quad \text{ s.t. } Y = Y C + E + Z, \;
\Diag(C) = 0.\]
We solve the program
\[\min \| C \|_{1,1} + \frac{\lambda}{2} \| Z \|_F^2
\quad \text{ s.t. } Y = Y C + Z, \;
C^T \OneVec = \OneVec, \; \Diag(C) = 0.\]
Eliminate Z from the program
\[\min \| C \|_{1,1} + \frac{\lambda}{2} \| Y - YC \|_F^2
\quad \text{ s.t. } C^T \OneVec = \OneVec, \; \Diag(C) = 0.\]
Introduce an auxiliary matrix \(A\) and consider the program
\[\min \| C \|_{1,1} + \frac{\lambda}{2} \| Y - YA \|_F^2
\quad \text{ s.t. } A^T \OneVec = \OneVec, \; A = C - \Diag(C).\]
The two programs have same solution.
Adding the penalty terms for equality constraints
\[\min \| C \|_{1,1} + \frac{\lambda}{2} \| Y - YA \|_F^2
+ \frac{\rho}{2} \| A^T \OneVec - \OneVec \|_2^2
+ \frac{\rho}{2} \| A - (C - \Diag(C)) \|_F^2
\quad \text{ s.t. } A^T \OneVec = \OneVec, \; A = C - \Diag(C).\]
Adding the penalty term doesn’t change the solution. The
penalty term vanishes for any feasible solution. The
objective function is now strictly convex.
Constructing the augmented Lagrangian by adding the multipliers
for the two equality terms
\[\begin{split}\begin{aligned}
\LLL(C, A, \delta, \Delta) &= \| C \|_{1,1} + \frac{\lambda}{2} \| Y - YA \|_F^2\\
&+ \frac{\rho}{2} \| A^T \OneVec - \OneVec \|_2^2
+ \frac{\rho}{2} \| A - (C - \Diag(C)) \|_F^2\\
&+ \delta^T (A^T \OneVec - \OneVec)
+ \Trace(\Delta^T (A - (C - \Diag(C)))).
\end{aligned}\end{split}\]
The ADMM algorithm would consist of
- Update \(A^{k+1}\) based on \((C^k, \Delta^k)\)
- Update \(C^{k+1}\) based on \((A^{k+1}, \Delta^k)\)
- Update \(\delta^{k+1}\) based on \((A^{k+1}, C^{k+1})\)
- Update \(\Delta^{k+1}\) based on \((A^{k+1}, C^{k+1})\)
\(A\)-update
Differentiating w.r.t. \(A\) gives us:
\[\lambda Y^T (YA - Y) + \rho (\OneVec \OneVec^T) A - \rho \OneVec \OneVec^T
+ \rho (A - (C - \Diag(C))) + \OneVec \delta^T + \Delta = 0.\]
\[(\lambda Y^T Y + \rho I + \rho \OneVec \OneVec^T)A =
\lambda Y^T Y + \rho \OneVec \OneVec^T + \rho (C - \Diag(C)) - \OneVec \delta^T- \Delta.\]
By construction, we will ensure that \(\Diag(C) = 0\)
for each iteration. Thus, \(A\) is updated by
solving the equation:
\[(\lambda Y^T Y + \rho I + \rho \OneVec \OneVec^T)A^{k+1} =
\lambda Y^T Y + \rho (\OneVec \OneVec^T + C^k)
- \OneVec {\delta^k}^T - \Delta^k.\]
\(C\) update
Let’s rewrite the augmented Lagrangian by removing the \(\Diag(C)\)
terms as:
\[\begin{split}\begin{aligned}
\LLL(C, A, \delta, \Delta) &= \| C \|_{1,1} + \frac{\lambda}{2} \| Y - YA \|_F^2\\
&+ \frac{\rho}{2} \| A^T \OneVec - \OneVec \|_2^2
+ \frac{\rho}{2} \| A - C) \|_F^2\\
&+ \delta^T (A^T \OneVec - \OneVec)
+ \Trace(\Delta^T (A - C))).
\end{aligned}\end{split}\]
Remove the terms which don’t depend on \(C\)
\[\| C \|_{1,1} + \frac{\rho}{2} \| A - C) \|_F^2
- \Trace(\Delta^T C).\]
A closed-form solution for the minimizer of this expression is
\[J = S_{\frac{1}{\rho}} (A^{k+1} + \Delta^k / \rho)\]
We obtain \(C\) from \(J\) by:
\[C^{k+1} = J - \Diag(J).\]
\(\delta\) and \(\Delta\) update
We perform the gradient ascent update of \(\delta\) as
\[\delta^{k+1} = \delta^k + \rho ({A^{k+1}}^T \OneVec - \OneVec).\]
We perform the gradient ascent update of \(\Delta\) as
\[\Delta^{k+1} = \Delta^k + \rho (A^{k+1} - C^{k+1}).\]
In summary, following changes were observed in ADMM iterations:
- A update step was adjusted.
- \(\delta\) update was introduced.
We solve the program
\[\min \| C \|_{1,1} + \lambda_e \| E \|_{1,1} + \frac{\lambda_z}{2} \| Z \|_F^2
\quad \text{ s.t. } Y = Y C + E + Z, \;
C^T \OneVec = \OneVec, \; \Diag(C) = 0.\]