Exercises¶
The best way to learn is by doing exercises yourself. In this section, we present a set of computer exercises which help you learn the fundamentals of sparse representations: algorithms and applications.
Most of these exercises are implemented in some form or
other as part of the sparse-plex library.
Once you have written your own implementations, you may
hunt the code in library and compare your implementation
with the reference implementation.
The exercises are described in terms of MATLAB programming environment. But they can be easily developed in other programming environments too.
Throughout these exercises, we will develop a set of functions which are reusable for performing various tasks related to sparse representation problems. We suggest you to collect such functions developed by you in one place together so that you can implement the more sophisticated exercises easily later.
Creating a sparse signal¶
The first aspect is deciding the support for the sparse signal.
- Decide on the length of signal N=1024.
- Decide on the sparsity level K=10.
- Choose K entries from 1..N randomly as your choice of sparse support. You can use
randpermfunction.
Now, we need to consider the values of non-zero entries in the sparse vector. Typically, they are chosen from a random distribution. Few of the common choices are:
- Gaussian
- Uniform
- Bi-uniform
Gaussian
- Generate K Gaussian random numbers with zero
mean and unit standard deviation. You can
use
randnfunction. You may choose to change the standard deviation, but mean should usually be zero. - Create a column vector with N zeros.
- On the entries indexed by the sparse support set, place the K numbers generated above.
Plotting
- Use
stemcommand to visualize the sparse signal.
Uniform
- Most of the steps are similar to creating a Gaussian sparse vector.
- The
randfunction generates a number uniformly between 0 and 1. - In order to generate a number uniformly between a and b,
we can use the simple trick of
a + (b -a) * rand
- Choose a and b (say -4 and 4).
- Generate K uniformly distributed numbers between a and b.
- Place them in the N length vector as described above.
- Plot them.
Bi-uniform
A problem with Gaussian and uniform distributions as described above is that they are prone to generate some non-zero entries which are much smaller compared to others.
Bi-uniform approach attempts to avoid this situation. It generates numbers uniformly between [-b, -a] and [a, b] where a and b are both positive numbers with a < b.
- Choose a and by [say 1 and 2].
- Generate K uniformly distributed random numbers between a and b (as discussed above). These are the magnitudes of the sparse non-zero entries.
- Generate K Gaussian numbers and apply
signfunction to them to map them to 1 and -1. Note that with equal probability, the signs would be 1 or -1. - Multiply the signs and magnitudes to generate your sparse non-zero entries.
- Place them in the N length vector as described above.
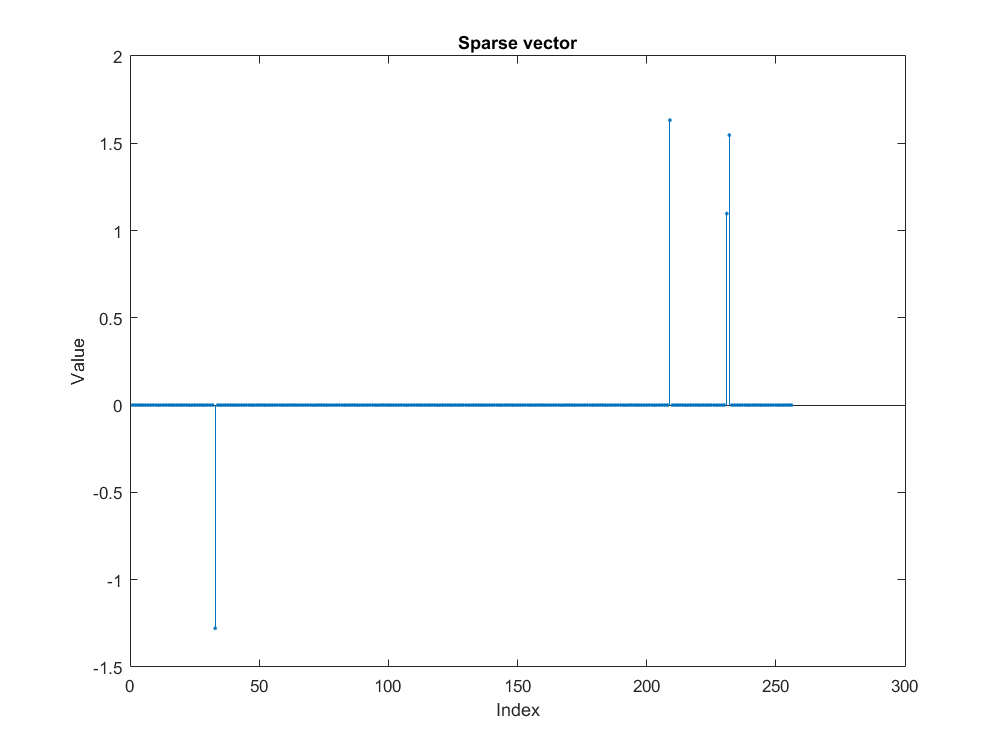
- Plot them.
Following image is an example of how a sparse vector looks.
Creating a two ortho basis¶
Simplest example of an overcomplete dictionary is Dirac Fourier dictionary.
- You can use
eye(N)to generate the standard basis of \(\mathbb{C}^N\) which is also known as Dirac basis. dftmtx(N)gives the matrix for forward Fourier transform. Corresponding Fourier basis can be constructed by taking its transpose.- The columns / rows of
dftmtx(N)are not normalized. Hence, in order to construct an orthonormal basis, we need to normalize the columns too. This can be easily done by multiplying with \(\frac{1}{\sqrt{N}}\).
- Choose the dimension of the ambient signal space (say N=1024).
- Construct the Dirac basis for \(\mathbb{C}^N\).
- Construct the orthonormal Fourier basis for \(\mathbb{C}^N\).
- Combine the two to form the two ortho basis (Dirac in left, Fourier in right).
Verification
We assume that the dictionary has been stored
in a variable named Phi. We will use the
mathematical symbol \(\Phi\) for the same.
- Verify that each column has unit norm.
- Verify that each row has a norm of \(\sqrt{2}\).
- Compute the Gram matrix \(\Phi' * \Phi\).
- Verify that the diagonal elements are all one.
- Divide the Gram matrix into four quadrants.
- Verify that the first and fourth quadrants are identity matrices.
- Verify that the Gram matrix is symmetric.
- What can you say about the values in 2nd and 3rd quadrant?
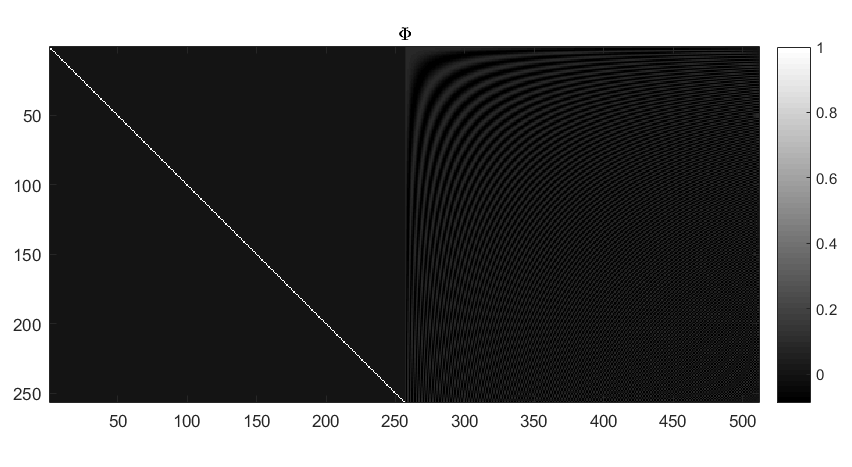
Creating a Dirac-DCT two-ortho basis¶
While Dirac-DFT two ortho basis has the lowest possible coherence amongst all pairs of orthogonal bases, it is not restricted to \(\mathbb{R}^N\). A good starting point is to consider constructing a Dirac-DCT two ortho basis.
- Construct the Dirac-DCT two-ortho basis dictionary.
- Replace
dftmtx(N)bydctmtx(N). - Follow steps similar to previous exercise to construct a Dirac-DCT dictionary.
- Notice the differences in the Gram matrix of Dirac-DFT dictionary with Dirac-DCT dictionary.
- Construct the Dirac-DCT dictionary for different values of N=(8, 16, 32, 64, 128, 256).
- Look at the changes in the Gram matrix as you vary N for constructing Dirac-DCT dictionary.
An example Dirac-DCT dictionary has been illustrated in the figure below.
Note
While constructing the two-ortho bases is nice for illustration, it should be noted that using them directly for computing \(\Phi x\) is not efficient. This entails full cost of a matrix vector multiplication. An efficient implementation would consider following ideas:
- \(\Phi x = [I \Psi] x = I x_1 + \Psi x_2\) where \(x_1\) and \(x_2\) are upper and lower halves of the vector \(x\).
- \(I x_1\) is nothing but x_1.
- \(\Psi x_2\) can be computed by using the efficient implementations of (Inverse) DFT or DCT transforms with appropriate scaling.
- Such implementations would perform the multiplication with dictionary in \(O(N \log N)\) time.
- In fact, if the second basis is a wavelet basis, then the multiplication can be carried out in linear time too.
- You are suggested to take advantage of these ideas in following exercises.
Creating a signal which is a mixture of sinusoids and impulses
If we split the sparse vector \(x\) into two halves \(x_1\) and \(x_2\) then: * The first half corresponds to impulses from the Dirac basis. * The second half corresponds to sinusoids from DCT or DFT basis.
It is straightforward to construct a signal which is a mixture of impulses and sinusoids and has a sparse representation in Dirac-DFT or Dirac-DCT representation.
- Pick a suitable value of N (say 64).
- Construct the corresponding two ortho basis.
- Choose a sparsity pattern for the vector x (of size 2N) such that some of the non-zero entries fall in first half while some in second half.
- Choose appropriate non-zero coefficients for x.
- Compute \(y = \Phi x\) to obtain a signal which is a mixture of impulses and sinusoids.
Verification
- It is obvious that the signal is non-sparse in time domain.
- Plot the signal using
stemfunction. - Compute the DCT or DFT representation of the signal (by taking inverse transform).
- Plot the transform basis representation of the signal.
- Verify that the transform basis representation does indeed have some large spikes (corresponding to the non-zero entries in second half of \(x\)) but the rest of the representation is also full with (small) non-zero terms (corresponding to the transform representation of impulses).
Creating a random dictionary¶
We consider constructing a Gaussian random matrix.
- Choose the number of measurements \(M\) say 128.
- Choose the signal space dimension \(N\) say 1024.
- Generate a Gaussian random matrix as \(\Phi = \text{randn(M, N)}\).
Normalization
There are two ways of normalizing the random matrix to a dictionary.
One view considers that all columns or atoms of a dictionary should be of unit norm.
- Measure the norm of each column. You may be tempted to write a for loop
to do the same. While this is alright, but MATLAB is known for its
vectorization capabilities. Consider using a combination of
sumconjelement wise multiplication andsqrtto come up with a function which can measure the column wise norms of a matrix. You may also explorebsxfun. - Divide each column by its norm to construct a normalized dictionary.
- Verify that the columns of this dictionary are indeed unit norm.
An alternative way considers a probabilistic view.
- We say that each entry in the Gaussian random matrix should be zero mean and variance \(\frac{1}{M}\).
- This ensures that on an average the mean of each column is indeed 1 though actual norms of each column may differ.
- As the number of measurements increases, the likelihood of norm being close to one increases further.
We can apply these ideas as follows.
Recall that randn generates Gaussian random variables with zero mean
and unit variance.
- Divide the whole random matrix by \(\frac{1}{\sqrt{M}}\) to achieve the desired sensing matrix.
- Measure the norm of each column.
- Verify that the norms are indeed close to 1 (though not exactly).
- Vary M and N to see how norms vary.
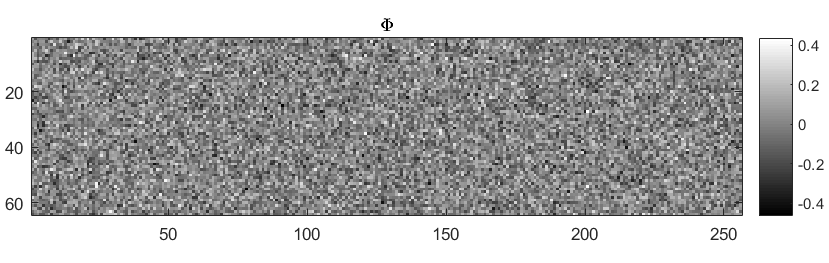
- Use
imagescorimshowfunction to visualize the sensing matrix.
An example Gaussian sensing matrix is illustrated in figure below.
Taking compressive measurements¶
- Choose a sparsity level (say K=10)
- Choose a sparse support over \(1 \dots N\) of size K randomly using
randpermfunction. - Construct a sparse vector with bi uniform non-zero entries.
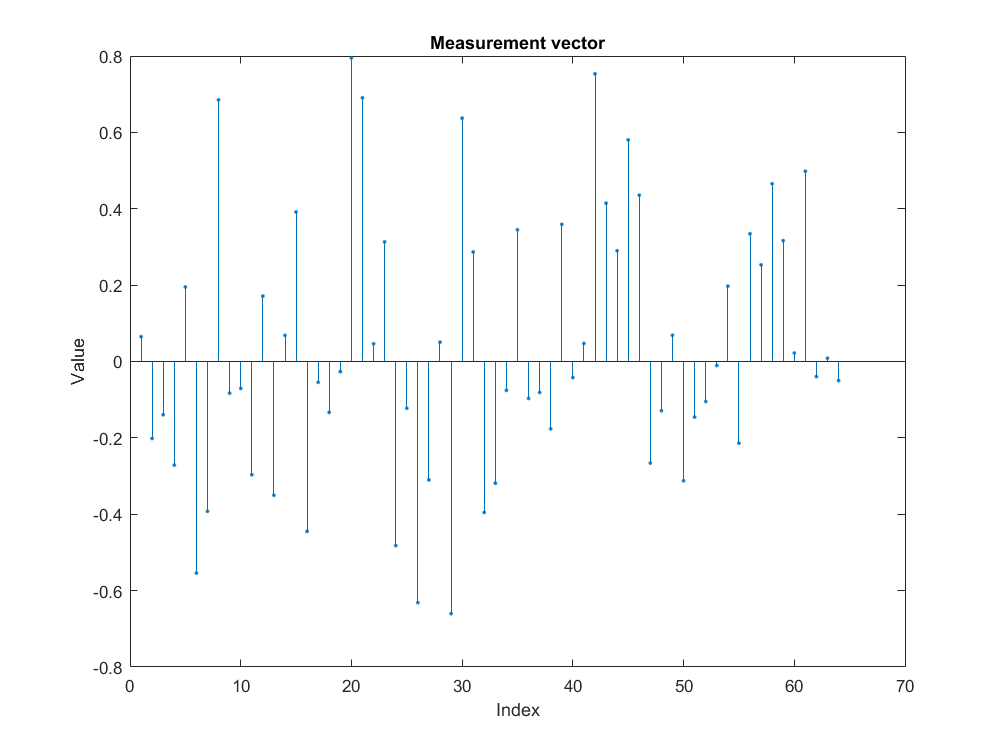
- Apply the Gaussian sensing matrix on to the sparse signal to compute compressive measurement vector \(y = \Phi x \in \mathbb{R}^M\).
An example of compressive measurement vector is shown in figure below.
In the sequel we will refer to the computation of noiseless measurement vector by the equation \(y = \Phi x\).
When we make measurement noisy, the equation would be \(y = \Phi x + e\).
Before we jump into sparse recovery, let us spend some time studying some simple properties of dictionaries.
Measuring dictionary properties¶
Gram matrix¶
You have already done this before. The straight forward calculation is \(G = \Phi' * \Phi\) where we are considering the conjugate transpose of the dictionary \(\Phi\).
- Write a function to measure the Gram matrix of any dictionary.
- Compute the Gram matrix for all the dictionaries discussed above.
- Verify that Gram matrix is symmetric.
For most of our purposes, the sign or phase of entries in the Gram
matrix is not important. We may use the symbol G to refer to
the Gram matrix in the sequel.
- Compute absolute value Gram matrix
abs(G).
Coherence¶
Recall that the coherence of a dictionary is largest (absolute value) inner product between any pair of atoms. Actually it’s quite easy to read the coherence from the absolute value Gram matrix.
- We reject the diagonal elements since they correspond to the inner product of an atom with itself. For a properly normalized dictionary, they should be 1 anyway.
- Since the matrix is symmetric we need to look at only the upper triangular half or the lower triangular half (excluding the diagonal) to read off the coherence.
- Pick the largest value in the upper triangular half.
- Write a MATLAB function to compute the coherence.
- Compute coherence of a Dirac-DFT dictionary for different values of N. Plot the same to see how coherence decreases with N.
- Do the same for Dirac-DCT.
- Compute the coherence of Gaussian dictionary (with say N=1024) for different values of M and plot it.
- In the case of Gaussian dictionary, it is better to take average coherence for same M and N over different instances of Gaussian dictionary of the specified size.
Babel function¶
Babel function is quite interesting. While the definition looks pretty scary, it turns out that it can be computed very easily from the Gram matrix.
- Compute the (absolute value) Gram matrix for a dictionary.
- Sort the rows of the Gram matrix (each row separately) in descending order.
- Remove the first column (consists of all ones in for a normalized dictionary).
- Construct a new matrix by accumulating over the columns of the
sorted Gram matrix above. In other words, in the new matrix
- First column is as it is.
- Second column consists of sum of first and second column of sorted matrix.
- Third column consists of sum of first to third column of sorted matrix .
- Continue accumulating like this.
- Compute the maximum for each column.
- Your Babel function is in front of you.
- Write a MATLAB function to carry out the same for any dictionary.
- Compute the Babel function for Dirac-DFT and Dirac-DCT dictionary with (N=256).
- Compute the Babel function for Gaussian dictionary with N=256. Actually compute Babel functions for many instances of Gaussian dictionary and then compute the average Babel function.
Getting started with sparse recovery¶
Our first objective will be to develop algorithms for sparse recovery in noiseless case.
The defining equation is \(y = \Phi x\) where \(x\) is the sparse representation vector, \(\Phi\) is the dictionary or sensing matrix and \(y\) is the signal or measurement vector. In any sparse recovery algorithm, following quantities are of core interest:
- \(x\) which is unknown to us.
- \(\Phi\) which is known to us. Sometimes we may know \(\Phi\) only approximately.
- \(y\) which is known to us.
- Given \(\Phi\) and \(y\), we estimate an approximation of \(x\) which we will represent as \(\widehat{x}\).
- \(\widehat{x}\) is (typically) sparse even if \(x\) may be only approximately sparse or compressible.
- Given an estimate \(\widehat{x}\), we compute the residual \(r = y - \Phi \widehat{x}\). This quantity is computed during the sparse recovery process.
- Measurement or signal error norm \(\| r \|_2\). We strive to reduce this as much as possible.
- Sparsity level \(K\). We try to come up with an \(\widehat{x}\) which is K-sparse.
- Representation error or recovery error \(f = x - \widehat{x}\). This is unknown to us. The recovery process tends to minimize its norm \(\| f \|_2\) (if it is working correctly !).
Some notes are in order
- K may or may not be given to us. If K is given to us, we should use it in our recovery process. If it is not given, then we should work with \(\| r \|_2\).
- While the recovery algorithm itself doesn’t know about \(x\) and hence cannot calculate \(f\), a controlled testing environment can carefully choose and \(x\), compute \(y\) and pass \(\Phi\) and \(y\) to the recovery algorithm. Thus, the testing environment can easily compute \(f\) by using the \(x\) known to it and \(\widehat{x}\) given by the recovery algorithm.
Usually the sparse recovery algorithms are iterative. In each iteration, we improve our approximation \(\widehat{x}\) and reduce \(\| r \|_2\).
- We can denote the iteration counter by \(k\) starting from 0 onwards.
- We denote k-th approximation by \(\widehat{x}^k\) and k-th residual by \(r^k\).
- A typical initial estimate is given by \(\widehat{x}^0 = 0\) and thus, \(r^0 = y\).
Objectives of recovery algorithm
There are fundamentally two objectives of a sparse recovery algorithm
- Identification of locations at which \(\widehat{x}\) has non-zero entries. This corresponds to the sparse support of \(x\).
- Estimation of the values of non-zero entries in \(\widehat{x}\).
We will use following notation.
- The identified support will be denoted as \(\Lambda\). It is the responsibility of the sparse recovery algorithm to guess it.
- If the support is identified gradually in each iteration, we can use the notation \(\Lambda^k\).
- The actual support of \(x\) will be denoted by \(\Omega\). Since \(x\) is unknown to us hence \(\Omega\) is also unknown to us within the sparse recovery algorithm. However, the controlled testing environment would know about \(\Omega\).
If the support has been identified correctly, then estimation part is quite easy. It’s nothing but the application of least squares over the columns of \(\Phi\) selected by the support set.
Different recovery algorithms vary in how they approach the support identification and coefficient estimations.
- Some algorithms try to identify whole support at once and then estimate the values of non-zero entries.
- Some algorithms identify atoms in the support one at a time and iteratively estimate the non-zero values for the current support.
Simple support identification
- Write a function which sorts a given vector by the decreasing order of magnitudes of its entries.
- Identify the K largest (magnitude) entries in the sorted vector and their locations in the original vector.
- Collect the locations of K largest entries into a set
Note
[sorted_x, index_vector] = sort(x) in MATLAB returns
both the sorted entries and the index vector
such that sorted_x = x[index_vector]. Our interest
is usually in the index_vector as we don’t want
to really change the order of entries in x while
identifying the largest K entries.
In MATLAB a set can be represented using an array. You have to be careful to ensure that such a set never have any duplicate elements.
Sparse approximation of a given vector
Given a vector \(x\) which may not be sparse, its K sparse approximation which is the best approximation in \(l_p\) norm sense can be obtained by choosing the K largest (in magnitude) entries.
- Write a MATLAB function to compute the K sparse representation of
any vector.
- Identify the K largest entries and put their locations in the support set \(\Lambda\).
- Compute \(\Lambda^c = \{1 \dots N \} \setminus \Lambda\).
- Set the entries corresponding to \(\Lambda^c\) in \(x\) to zero.
The proxy vector
A very interesting quantity which appears in many sparse recovery algorithms is the proxy vector \(p = \Phi' r\).
The figure below shows a sparse vector, its measurements and corresponding proxy vector \(p^0 = \Phi r^0 =\Phi y\).
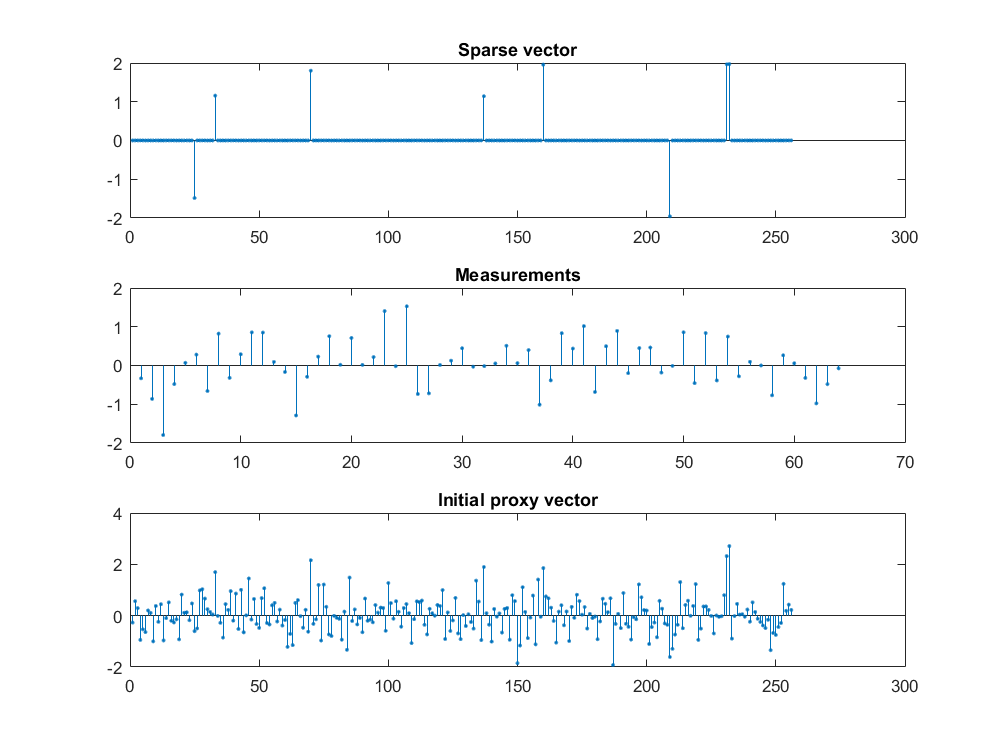
While the proxy vector may look quite chaotic on first look, it is very interesting to note that it tends to have large entries at exactly the same location as the sparse vector \(x\) itself.
if we think about the proxy vector closely, we can notice that each entry in the proxy is the inner product of an atom in \(\Phi\) with the residual \(r\). Thus, each entry in proxy vector indicates how similar an atom in the dictionary is with the residual.
- Choose M, N and K and construct a sparse vector \(x\) with support \(\Omega\) and Gaussian dictionary \(\Phi\).
- For the measurement vector \(y = \Phi x\), compute \(p = \Phi' y\).
- Identify the K largest entries in \(p\) and use their locations to make a guess of support as \(\Lambda\).
- Compare the sets \(\Omega\) and \(\Lambda\). Measure the support identification ratio as \(\frac{|\Lambda \cap \Omega|}{|\Omega|}\) i.e. the ratio of the number of indices common in \(\Lambda\) and \(\Omega\) with the number of indices in \(\Omega\) (which is K).
- Keep M and N fixed and vary K to see how support identification ratio changes. For this, measure average support identification ratio for say 100 trials. You may increase the number of trials if you want.
- Keep K=4, N=1024 and vary M from 10 to 500 to see how support identification ratio changes. Again use the average value.
Note
The support identification ratio is a critical tool for evaluating the quality of a sparse recovery algorithm. Recall that if the support has been identified correctly, then reconstructing a sparse vector is a simple least squares problem. If the support is identified partially, or some of the indices are incorrect, then it can lead to large recovery errors.
If the support identification ratio is 1, then we have correctly identified the support. Otherwise, we haven’t.
For noiseless recovery, if support is identified correctly, then representation will be recovered correctly (unless \(\Phi\) is ill conditioned). Thus, support identification ratio is a good measure of success or failure of recovery. We don’t need to worry about SNR or norm of recovery error.
In the sequel, for noiseless recovery, we will say that recovery succeeds if support identification ratio is 1.
If we run multiple trials of a recovery algorithm (for a specific configuration of K, M, N etc.) with different data, then the recovery rate would be the number of trials in which successful recovery happened divided by the total number of trials.
The recovery rate (on reasonably high number of trials) would be our main tool for measuring the quality of a recovery algorithm. Note that the recovery rate depends on
- The representation space dimension \(N\).
- The number of measurements \(M\).
- The sparsity level \(K\).
- The choice of dictionary \(\Phi\).
It doesn’t really depend much on the choice of distribution for the non-zero entries in \(x\) if the entries are i.i.d. Or the dependence as such is not very significant.
Developing the hard thresholding algorithm¶
Based on the idea of the proxy vector, we can easily compute a sparse approximation as follows.
- Identify the K largest entries in the proxy and their locations.
- Put the locations together in your guess for the support \(\Lambda\).
- Identify the columns of \(\Phi\) corresponding to \(\Lambda\) and construct a submatrix \(\Phi_{\Lambda}\).
- Compute \(x_{\Lambda} = \Phi_{\Lambda}^{\dagger} y\) as the least squares solution of the problem \(y = \Phi_{\Lambda} x_{\Lambda}\).
- Set the remaining entries in \(x\) corresponding to \(\Lambda^c\) as zeros.
Put together the algorithm described above in a MATLAB function
like x_hat = hard_thresholding(Phi, y, K).
- Think and explain why hard thresholding will always succeed if \(K=1\).
- Say \(N=256\) and \(K=2\). What is the required number of measurements at which the recovery rate will be equal to 1.
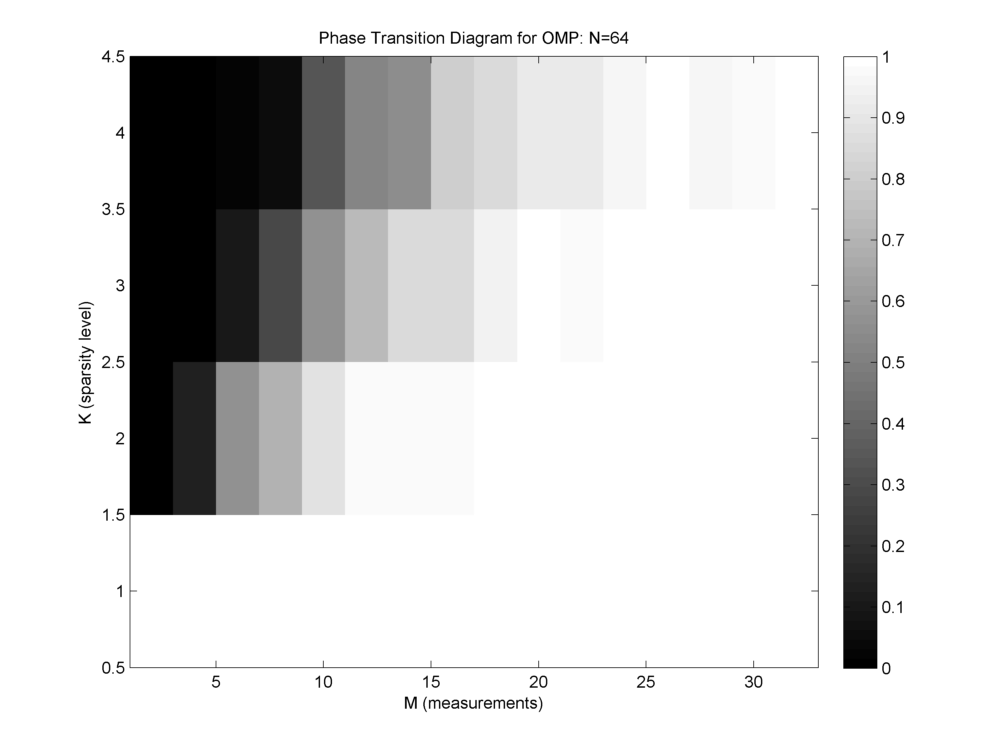
Phase transition diagram
A nice visualization of the performance of a recovery algorithm is via its phase transition diagram. The figure below shows the phase transition diagram for orthogonal matching pursuit algorithm with a Gaussian dictionary and Gaussian sparse vectors.
- N is fixed at 64.
- K is varied from 1 to 4.
- M is varied from 1 and 2 to 32 (N/2) with steps of 2.
- For each configuration of K and M, 1000 trials are conducted and recovery rate is measured.
- In the phase transition diagram, a white cell indicates that for the corresponding K and M, the algorithm is able to recover successfully always.
- A black cell indicates that the algorithm never successfully recovers any signal for the corresponding K and M.
- A gray cell indicates that the algorithm sometimes recovers successfully while sometimes it may fail.
- Safe zone of operation is the white area in the diagram.
In the figure below, we capture the minimum required number of measurements for different values of K for OMP algorithm running on Gaussian sensing matrix.
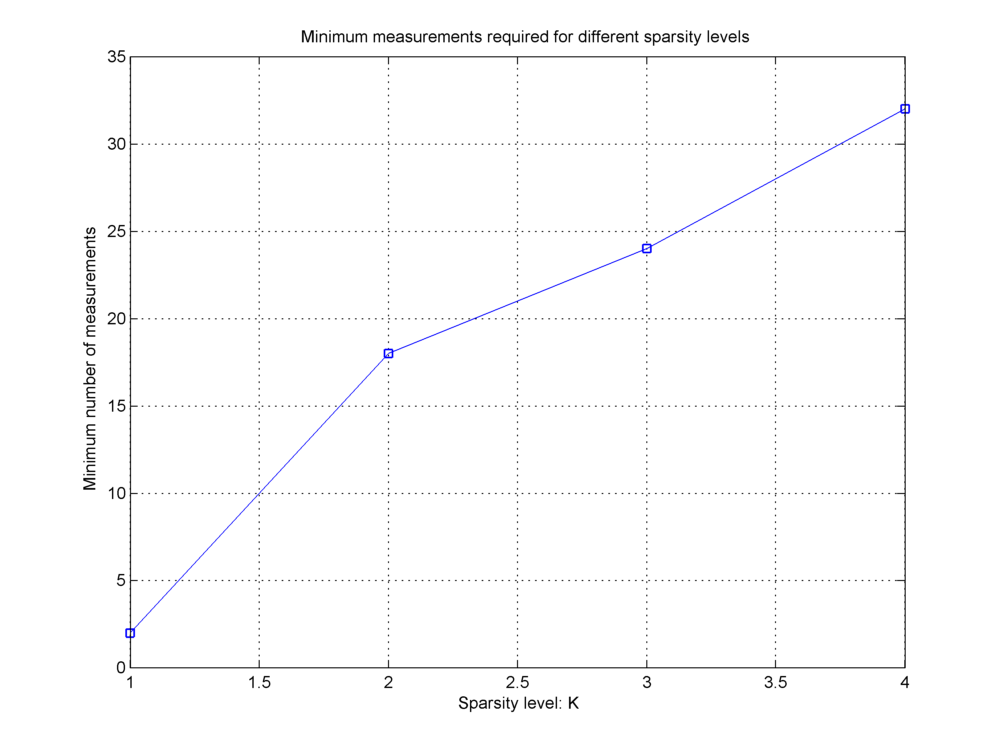
It is evident that as K increases, the minimum M required for successful recovery also increases.
- Generate the phase transition diagram for thresholding algorithm with N = 256, K varying from 1 to 16 and M varying from 2 to 128 and a minimum of 100 trials for each configuration.
- Use the phase transition diagram data for estimating the minimum M for different values of K and plot it.
Developing the matching pursuit algorithm¶
You can read the description of matching pursuit algorithms on Wikipedia. This is a simpler algorithm than orthogonal matching pursuit. It doesn’t involve any least squares step.
- Implement the matching pursuit (MP) algorithm in MATLAB.
- Generate the phase transition diagram for MP algorithm with N = 256, K varying from 1 to 16 and M varying from 2 to 128 and a minimum of 100 trials for each configuration.
- Use the phase transition diagram data for estimating the minimum M for different values of K and plot it.
Developing the orthogonal matching pursuit algorithm¶
The orthogonal matching pursuit algorithm is described in the figure below.
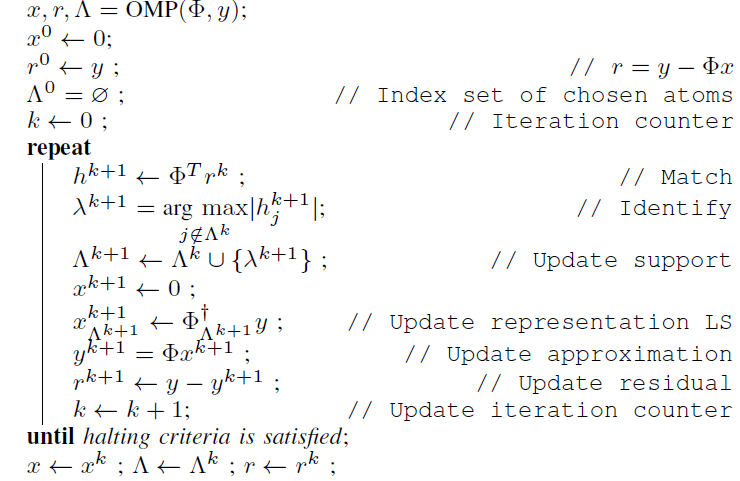
- Implement the orthogonal matching pursuit (OMP) algorithm in MATLAB.
- Generate the phase transition diagram for OMP algorithm with N = 256, K varying from 1 to 16 and M varying from 2 to 128 and a minimum of 100 trials for each configuration.
- Use the phase transition diagram data for estimating the minimum M for different values of K and plot it.