Dirac DCT Tutorial¶
This tutorial is based on examples\\ex_dirac_dct_two_ortho_basis.m.
In this tutorial we will:
- Construct a DCT basis
- Construct a Dirac-DCT dictionary.
- Construct a signal which is a mixture of few impulses and a few sinusoids.
- Construct its representation in the DCT basis.
- Recover its representation in Dirac-DCT dictionary
using following sparse recovery algorithms
- Matching Pursuit
- Orthogonal Matching Pursuit
- Basis Pursuit
- Measure the recovery error for different sparse recovery algorithms.
Signal space dimension:
N = 256;
Dirac basis:
I = eye(N);
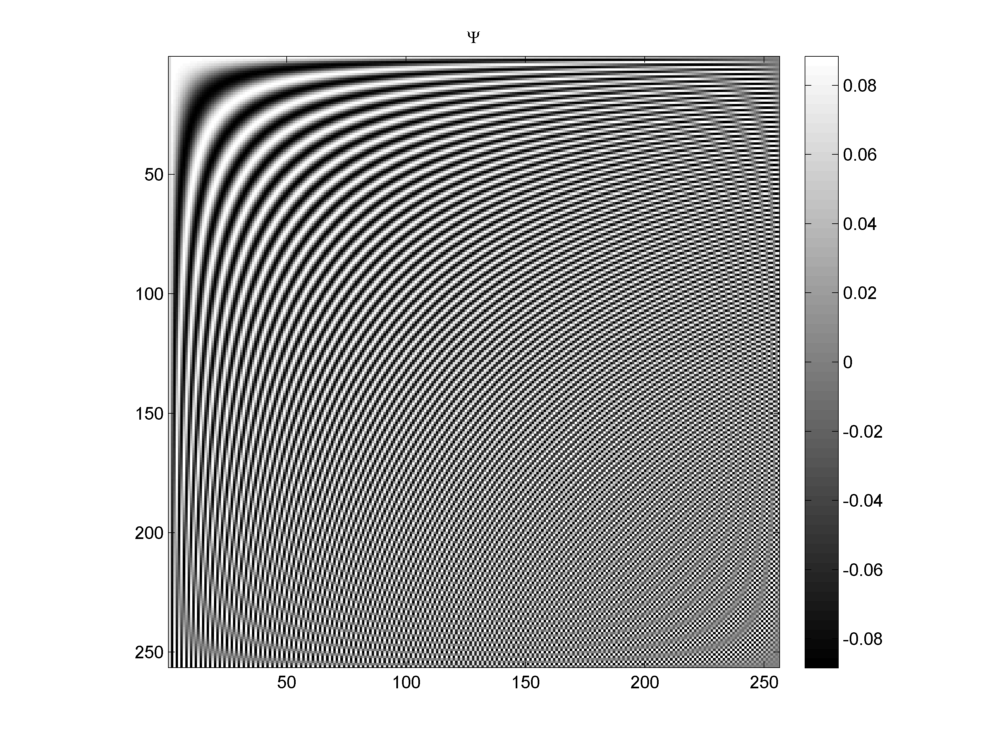
DCT basis:
Psi = dctmtx(N)';
Visualizing the DCT basis:
imagesc(Psi) ;
colormap(gray);
colorbar;
axis image;
title('\Psi');
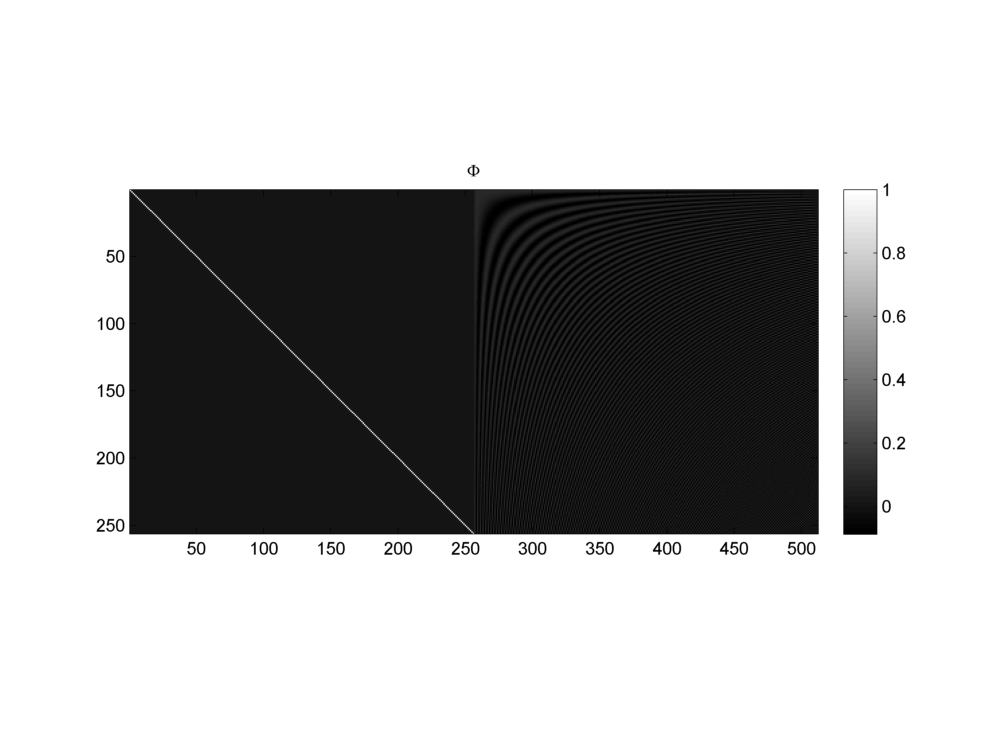
Combining the Dirac and DCT orthonormal bases to form a two-ortho dictionary:
Phi = [I Psi];
Visualizing the dictionary:
imagesc(Phi) ;
colormap(gray);
colorbar;
axis image;
title('\Phi');
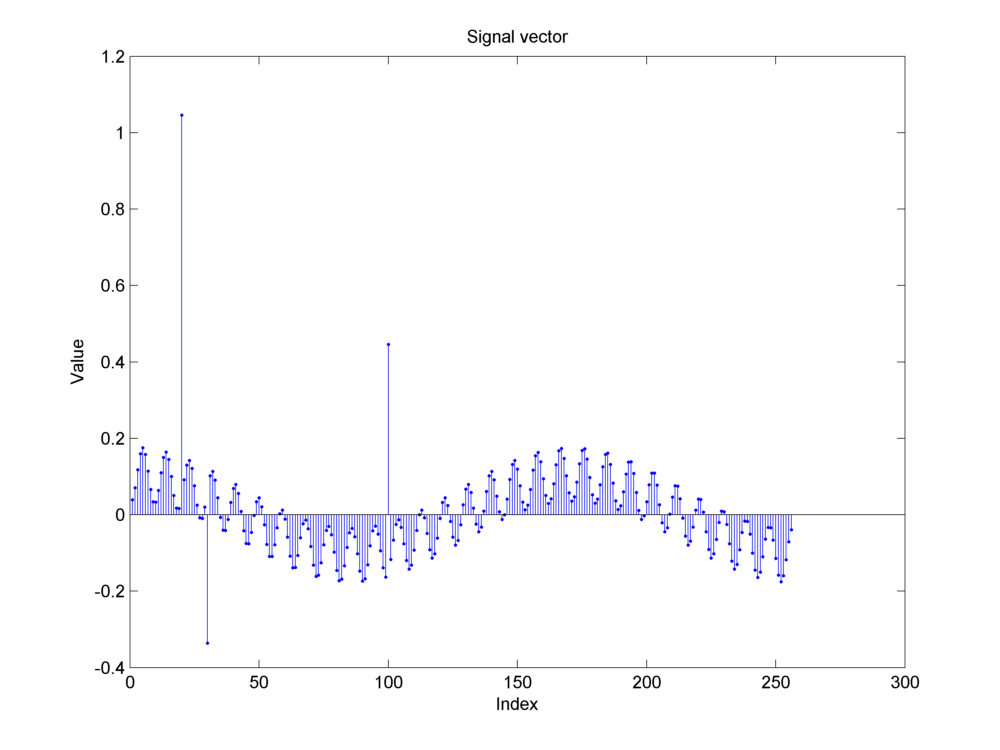
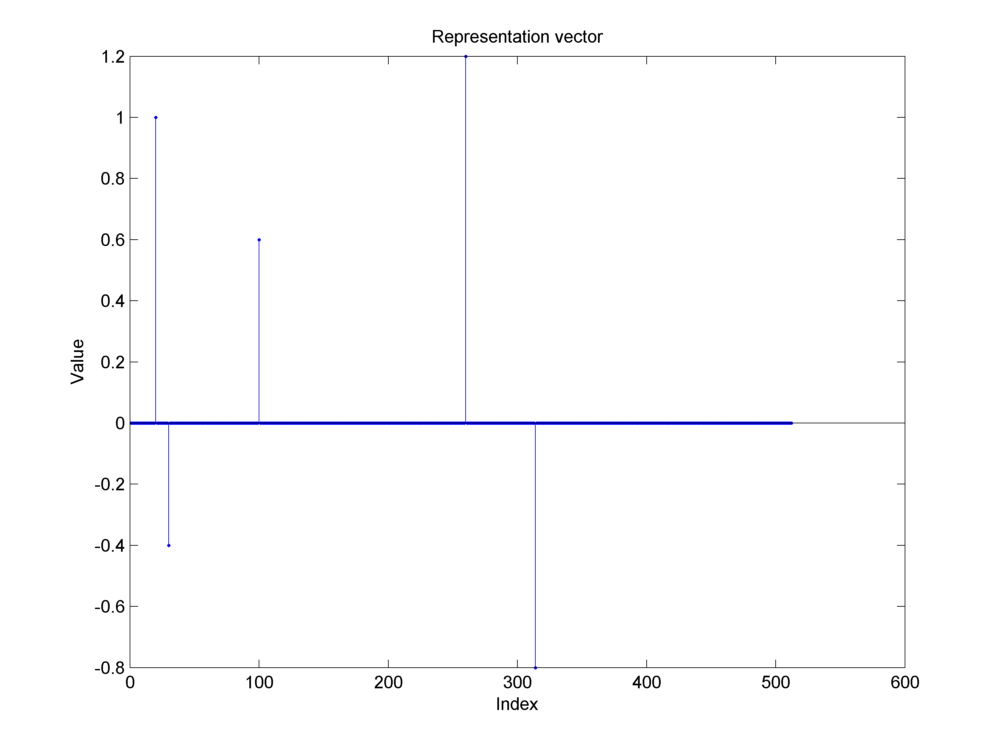
Constructing a signal which is a combination of impulses and cosines:
alpha = zeros(2*N, 1);
alpha(20) = 1;
alpha(30) = -.4;
alpha(100) = .6;
alpha(N + 4) = 1.2;
alpha(N + 58) = -.8;
x = Phi * alpha;
K = 5;
Finding the representation in DCT basis:
x_dct = Psi' * x;
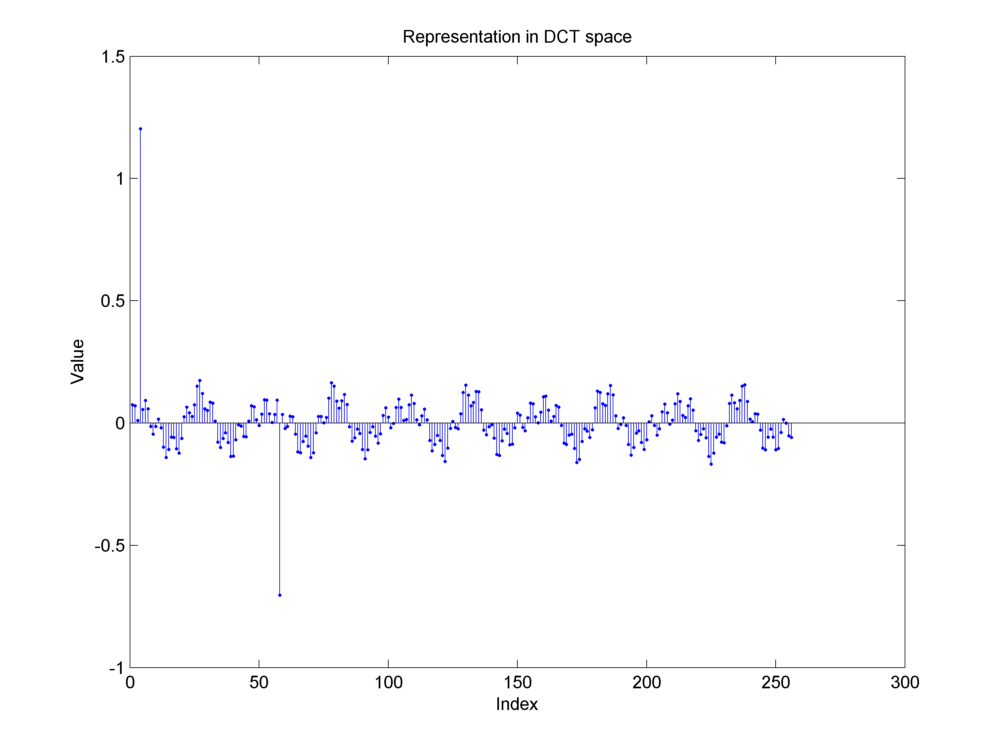
Sparse representation in the Dirac DCT dictionary
Obtaining the sparse representation using matching pursuit algorithm:
solver = spx.pursuit.single.MatchingPursuit(Phi, K);
result = solver.solve(x);
mp_solution = result.z;
mp_diff = alpha - mp_solution;
% Recovery error
mp_recovery_error = norm(mp_diff) / norm(x);
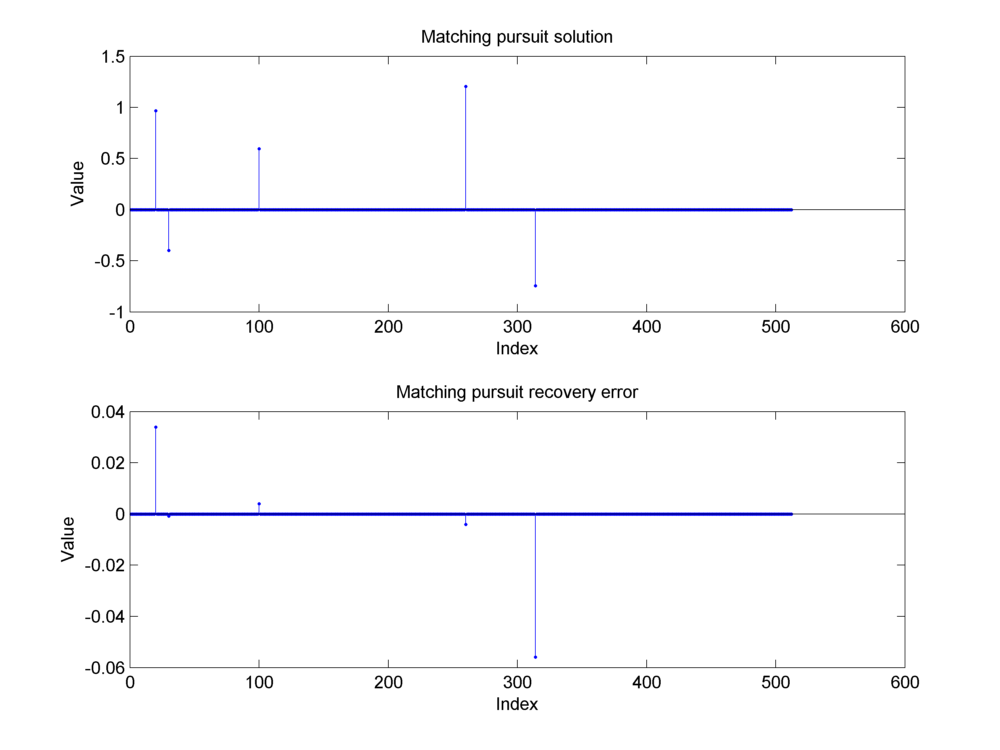
Matching pursuit recovery error: 0.0353.
Obtaining the sparse representation using orthogonal matching pursuit algorithm:
solver = spx.pursuit.single.OrthogonalMatchingPursuit(Phi, K);
result = solver.solve(x);
omp_solution = result.z;
omp_diff = alpha - omp_solution;
% Recovery error
omp_recovery_error = norm(omp_diff) / norm(x);
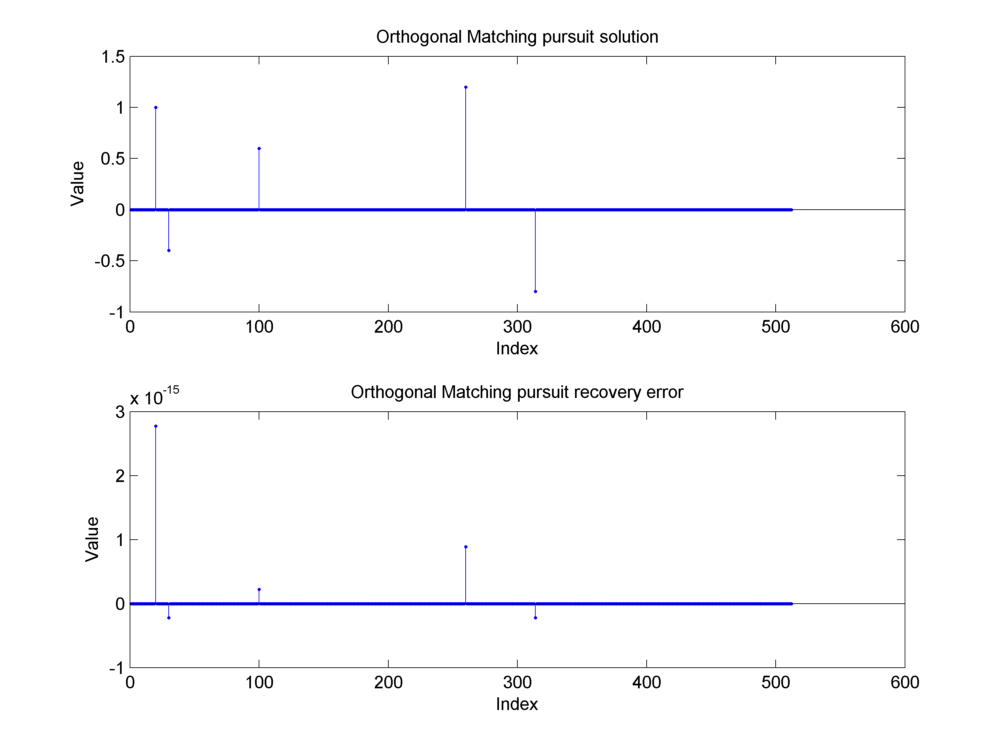
Orthogonal Matching pursuit recovery error: 0.0000.
Obtaining a sparse approximation via basis pursuit:
solver = spx.pursuit.single.BasisPursuit(Phi, x);
result = solver.solve_l1_noise();
l1_solution = result;
l1_diff = alpha - l1_solution;
% Recovery error
l1_recovery_error = norm(l1_diff) / norm(x);
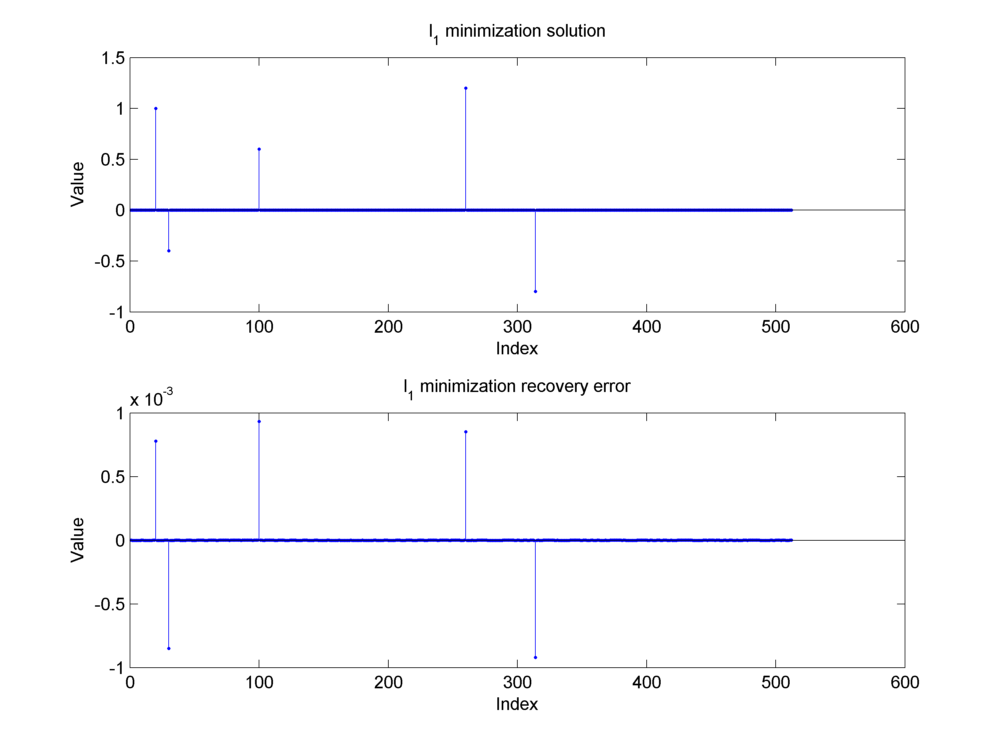
l_1 recovery error: 0.0010.